
「レスコン」カテゴリーアーカイブ
メカナムホイールの試作機
メカナムホイールの試作機を実際に動かせるかテストしました。
なぜか4輪駆動の内の3輪しか動かないトラブルが起きました。
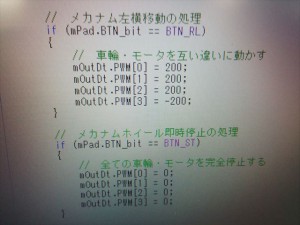
原因は、プログラム上で1番から順番に車輪への出力をしているつもりでプログラムを書いたことです。コンピューターは1からではなく0から順番にカウントしているのが原因でした。そのため、自分が思っている出力が1つずつずれていました。最後の出力が対応する車輪が動いていませんでした。
また、動いている車輪をボタン1つで全て停止させるプログラムを追加しました。これで全ての車輪が動くようになりました。しかし、実際に動かしてみると新たに問題が発生しました。
真っ直ぐ前後に移動できません。車輪が空回りして真横にも上手く進めないということもわかりました。原因は荷重や重心のバランスが偏っていることだと考えています。
今後はプログラム上で調整をしたりして上手く動く事を実現したいです。(千葉 到君:電子機械工学科1年)
カテゴリー: レスコン
部品加工
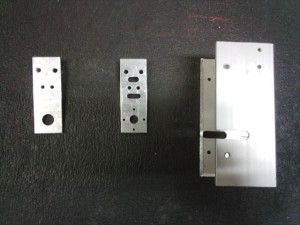
他のメンバーに頼まれ、テクノフェアで展示するためのガレキ撤去ロボットの部品を作りました。
ある程度加工されている部品があり、ポンチで目印を打ちました。ボール盤で指定された場所に穴を開けるとき、小さな部品なので、ドリルに巻き込まれて部品が飛んでいかないように気をつけました。(千葉 到君:電子機械工学科1年)
カテゴリー: レスコン
家ガレキ対策
来年の大会に向けて、どんなロボットを作るか構想を練っています。今は2号機をどんな風にしたいか考えています。条件としては家ガレキを支えるジャッキがあることです。
しかし、僕が考えたロボットでは上手く行かないということが分かりました。僕の考えたジャッキでは家の重みに耐えられないと言われました。
さらに、僕が考えた物と違い一台で全てのレスキュー活動が出来る万能型ロボットでなければいけないと言われました。まだ、来週まで考える時間があるのでゆっくりと納得できる構想を考えたいです。(千葉 到君:電子機械工学科1年)
カテゴリー: レスコン
テクノフェアを終えて
テクノフェアに向けて作っていたロボットが無事に完成し、テクノフェアでの展示もトラブルなくできていました。来場客の方々に動かしてもらったりもしたのですが、こちらの希望通りの動きをしてくれました。これからは、レスコンの本戦に使うロボットを考えながらこのロボットも改造を加えて本戦に使えたらいいなと思っています。(門口祐也君:資産運用学科1年)
カテゴリー: レスコン
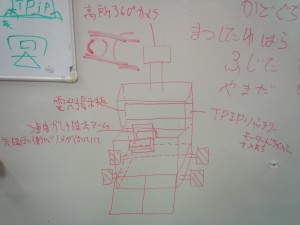
万能型ロボット構想
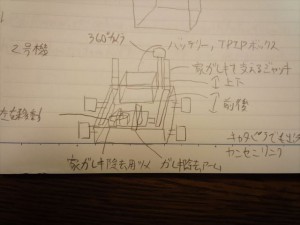
今は万能型のロボットを考えています。このロボットのイメージ図は僕が考えました。
特徴はいくつかあります。1)高い所から360°周囲を見渡せるカメラ 2)縦横無尽に移動出来るメカナムホイール 3)床にも家ガレキにも対応できる3軸ガレキアーム。
このアームの先端には2つのツメが付いていてそれにより両方のガレキに対応出来る構想です。
これから、みんなで話し合ってどんなロボットを作っていくのか楽しみです。(千葉 到君:電子機械工学科1年)
カテゴリー: レスコン
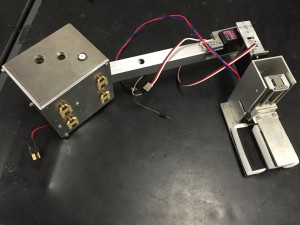
展示用ロボット作成開始
11/6に開催されるテクノフェアに向けて、瓦礫除去ロボットを作成をしています。写真のアームとキャタピラ駆動を組み合わせてロボットを作るので、必要な素材の図面を作るためjwcadの勉強を始めました。目標は来週までにロボットのための部品を図面、実物共に作ることです。(門口祐也君:資産運用学科1年)

カテゴリー: レスコン
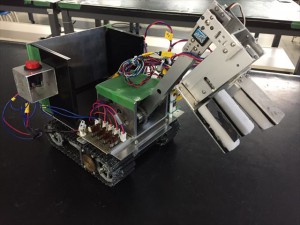
移動プログラム
メカナムホイールの足まわりの上にtpipとバッテリーを載せる部分の組み立てをしました。そして、プログラムの開発を始めました。ゲームコントローラーの対応するボタンが押されると縦横真横に移動するプログラムを考えました。しかし、ボタンが何も押されていないのに常に前進の出力が表示されるという現象が発生しました。先輩に聞いたりして上手く動くようにしたいです。(千葉 到君:電子機械工学科1年)

カテゴリー: レスコン
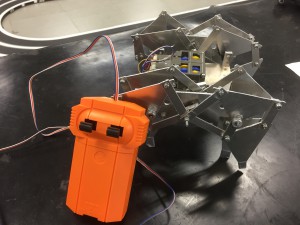
ヤンセンビーストが完成
某社の力も借り、3週間かけてヤンセンビーストを完成しました。動力部は有線でリモコン制御です。足にスポンジを巻いたらグリップが効いて、滑らないで進んでくれました!有線だと可動範囲が決まってくるので、無線にして可動範囲を広めたいです。(黒木稔真君:電子機械工学科1年)
カテゴリー: レスコン
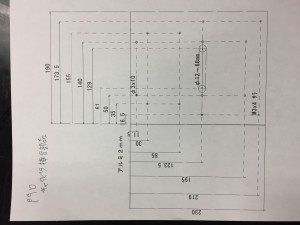
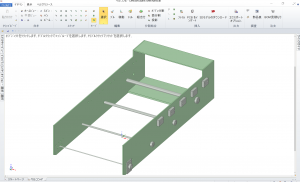
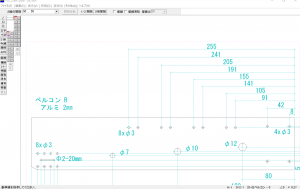
ベルトコンベヤの設計
9月の中旬ごろから今年度の大会に出場したロボットのベルコンを参考にして、一から設計をしていました。
ベルトを回転させる方法や、前後機構をどうするか考えながら、まずはデザインスパークで設計し、jwcadで2Dの設計図を作りました。デザインスパークやjwcadの使い方を覚えながらの作業だったので予想以上に時間がかかりましたが、先輩方に相談をしながら作業をしました。
設計図はできたので来週からは加工を始めていこうと思います。(山田秦也君:電子機械工学科1年)
カテゴリー: レスコン